
Palvelumuotoilu -tiimimme otti hiljattain osaa Future City Challenge 2018 -kaupunkihaasteeseen, jossa pyrimme ratkaisemaan Oulun kaupungin asettaman haasteen, miten roskat saadaan roskikseen eikä sinne ja tänne. Ratkaisun tuli hyödyntää mm. IBM pilvipalveluita, Digitan LoRa -verkkoa sekä IoT teknologiaa (SODAQ Explorer). Lisäksi ratkaisun tulisi tuoda lisäarvoa kaupunkien asukkaille.
Ongelman pyörittelyä
Lähdimme ideoimaan erilaisia ratkaisuvaihtoehtoja ja jakamaan ongelmaa pienempiin osiin. Osaltaan haastetta loivat teknologioiden yhteensovittaminen, mutta myös ratkaisuvaihtoehtojen järkevä mittakaava. Haasteen tarkoituksena oli työstää ensimmäinen pilotti, proof of concept, jonka avulla voitaisiin todistaa idean toimivuus käytännössä.
Alusta lähtien oli selvää, että mikäli roskia halutaan laittaa roskikseen, tulee roskiksessa olla tilaa. Tämän pohjalta aloimme suunnitella, kuinka voisimme mitata roskiksen täyttöastetta ja pilvipalveluita hyödyntäen lähettää tietoa ”ohjauskeskukseen”, jotta roskikset osattaisiin käydä tyhjentämässä ajoissa. Tämän suuntaisia ratkaisuja on toki maailmalla jo tarjolla, mutta Suomessa emme vielä olleet törmänneet vastaaviin.
Havainnointia
Halusimme selvittää, kuinka nykyiset roskapöntöt vastaavat tarpeeseen ja voisimmeko kehittää nykyisiä pönttöjä edelleen. Näin ollen jalkauduimme havainnoimaan Oulun Rotuaarilla, kuinka kaupunkilaiset käyttävät roskapönttöjä ja minkälaisia haasteita nykyiset roskapöntöt aiheuttavat. Havaintojen pohjalta kävi ilmi muun muassa, että nykyiset roskapöntöt eivät erotu massasta, ovat paikoin epäsiistejä ja jopa hankalasti sijoiteltu.
Learning by doing
Jotta voisimme näyttää kuinka ratkaisumme toimii käytännössä, täytyi meidän työstää siitä prototyyppi. Päätimme tehdä tämän vaiheittain;

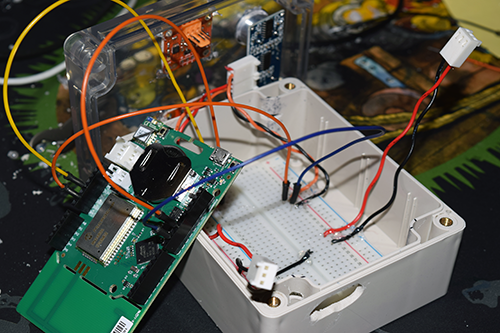
Ensimmäisessä vaiheessa muokkasimme SODAQ Explorerin firmwarea ja pyrimme saamaan yhteyden IBM Cloudiin. Data täytyi myös saada näkymään web-sivulle ja tähän otimme käyttöön MongoDB tietokannan, josta data on haettavissa RESTful apin kautta. Näin saimme Explorerin lähettämän datan näkyviin nettisivulle ja varmistuimme että yhteys pilveen toimii.
Toisessa vaiheessa keskityimme rakentamaan sensoriyksikön roskapönttöön. Sensorina hyödynsimme ultraäänisensoria, jolla voidaan mitata etäisyyksiä. Asensimme myös pari led -valoa, joista punainen näyttää kun etäisyys on ”täynnä” ja vihreä näyttää datan lähetyksen pilveen. Tämä mahdollisti visuaalisen debuggauksen, silloin kun serial-logi ei ollut saatavilla. Tämän avulla löysimme myös ongelman SODAQ Explorerin kanssa, sillä sensorimme vaatii 5V jännitteen, mikä on saatavilla ainoastaan kun laite on kytketty USB:hen tai laite saa virtansa aurinkokennoista. Virransyöttöä täytyisi hioa lisää tulevissa prototyypeissä.
Kolmannessa vaiheessa päätimme keskittyä kehittämään Pythonilla graafisen ohjelman, sensori datan näyttämiseen visuaalisesti. Tätä ohjelmaa on myös helppo laajentaa jatko pilotteja ajatellen.
Neljäs vaihe oli roskapöntön rakentaminen demoa varten ja sensorin istuttaminen pönttöön. Tässä vaiheessa pääsimme myös testaamaan kokonaisuutta ja korjaamaan ongelmia.
Yhteenveto
 Vaikka yrityksemme onkin keskittynyt palvelumuotoiluun, eri muodoissa, täytyy meidän olla perillä myös teknisestä kehityksestä.
Vaikka yrityksemme onkin keskittynyt palvelumuotoiluun, eri muodoissa, täytyy meidän olla perillä myös teknisestä kehityksestä.
Palvelumuotoiluprojekteissa hyödynnämme tarvittaessa Design Thinking -ajattelua, jossa ideoiden pohjalta muodostetaan prototyyppi, jotain minkä avulla idean toimivuutta voidaan testata käytännössä. Prototyypeistä saatu oppi myös hyödynnetään jatkoideoinnissa. Näin kehitystä voidaan viedä eteenpäin pienissä iteraatioissa, ilman että heti tiedetään vastauksia kaikkiin kysymyksiin.
Nyt siis enää odotamme, kuinka haasteessa käy. Tulosten pitäisi valmistua helmikuun puolivälissä.